視覺觀測點膠機器人對流動涂膠效果是怎么控制的?
作者:點膠機廠家 日期:2019-06-26 14:58 瀏覽:
現今控制粘劑
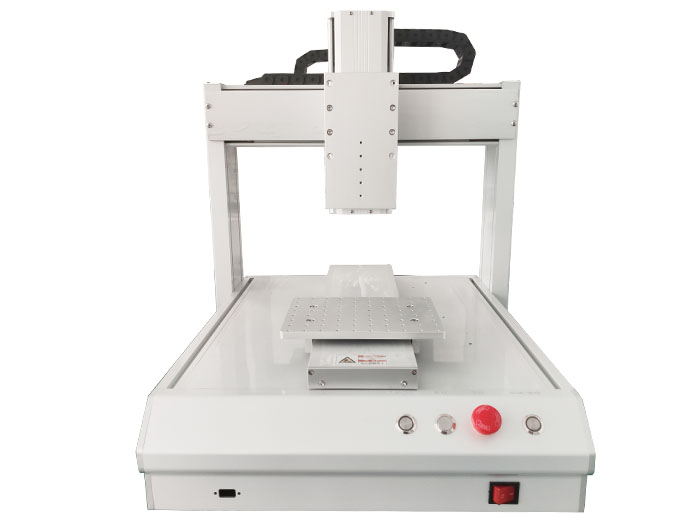
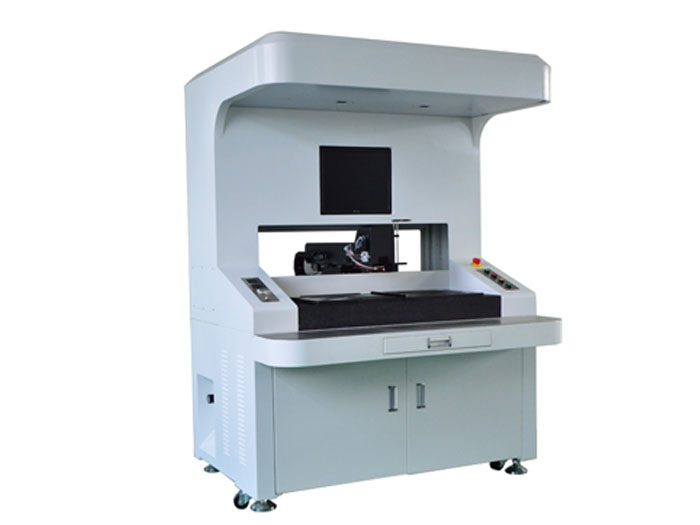
流動涂膠的裝置主要為自動點膠設備,更為智能化的視覺點膠機對涂膠控制的效果遠勝傳統模式,如視覺版
觀測點膠機器人的涂膠控制相對均勻穩定,與其觀測系統的職能控制是不可分割的,因這種效率高涂膠均勻穩定等特點對PTC粘接與指紋模組填充的效率與質量保證同樣可應用這款設備執行,而這種控制模式需滿足于常用的底部填充膠料符合,本次將據此讓用戶簡單了解下視覺觀測點膠機器人對流動涂膠的控制是怎么實現的。
與自動點膠機控制模式的區別
桌面式的自動點膠設備需通過控制板逐步設定路徑參數用于點膠,與此不同的是觀測點膠機器人通過視覺定位系統確定半成品的位置以完成涂膠填充等應用,這種流動涂膠的控制效果從實際效果看反應快且應用效果顯而易見,以視覺定制確定半成品涂膠填充的位置后即可掌控出膠的效果,膠閥對需求底部填充膠料的精密控制的模式符合大部分的粘接填充需要,一般而言視覺觀測點膠機會加裝精密點膠閥用于控制流動涂膠量并避免過度涂膠而導致的溢出偏差等問題影響,這樣的執行穩定性更符合
PTC粘接與指紋模組填充等質量高的應用要求中使用。
控制流動膠料的重要性
目前大多數膠閥需要氣壓驅動使流體受力而逐漸流動涂膠至粘接填充位置中,視覺觀測點膠機同樣是加裝這種氣壓式點膠閥進行涂膠控制,視覺檢測定位的功能僅為輔助定位控制,而能起到調整流動涂膠狀態的應是點膠閥所發揮的用處,操作人員調整氣壓大小至適當范圍能起到較好穩定的流動涂膠控制作用,如氣壓調整過大會造成膠體流動較快而涂膠過多,反之氣壓過小流動慢造成涂膠量缺少,這是常見導致底部填充膠料不均或漏出的一種原因,因此有關氣壓的控制據此進行調整是十分重要的,這對于需求穩定精密的PTC粘接或
指紋模組填充環節更是重中之重。
從目前來看視覺觀測點膠機器人能夠精密控制
流動涂膠效果應通過膠閥的控制主導調整,需注重于氣壓調整方面以控制流動滴出效果,確認符合
底部填充膠料的粘度大小再用于涂膠比較推薦。